openGauss
开源数据库
openGauss社区官网
开源社区
openGauss B-tree索引读写并发原理
openGauss B-tree 索引读写并发原理
本文主要依据 LEHMAN & YAO 的 Efficient Locking for Concurrent Operations on B-tree,以及 openGauss 的代码,探索 openGauss 的 B-tree 索引的读写并发原理。
openGauss 索引详解讲 B-tree 索引结构时讲到,B-tree 索引的每个节点都有指针指向其右侧的节点(link pointer),link pointer 提供了额外的方法访问右侧的节点。当一个节点分裂成左右两个节点,分裂后左侧的节点与原来的节点在磁盘上占据相同的物理页,左侧节点通过 link pointer 和右侧节点相连。因此,左右两个节点逻辑上可以视为一个节点,直到父节点更新子节点的信息。
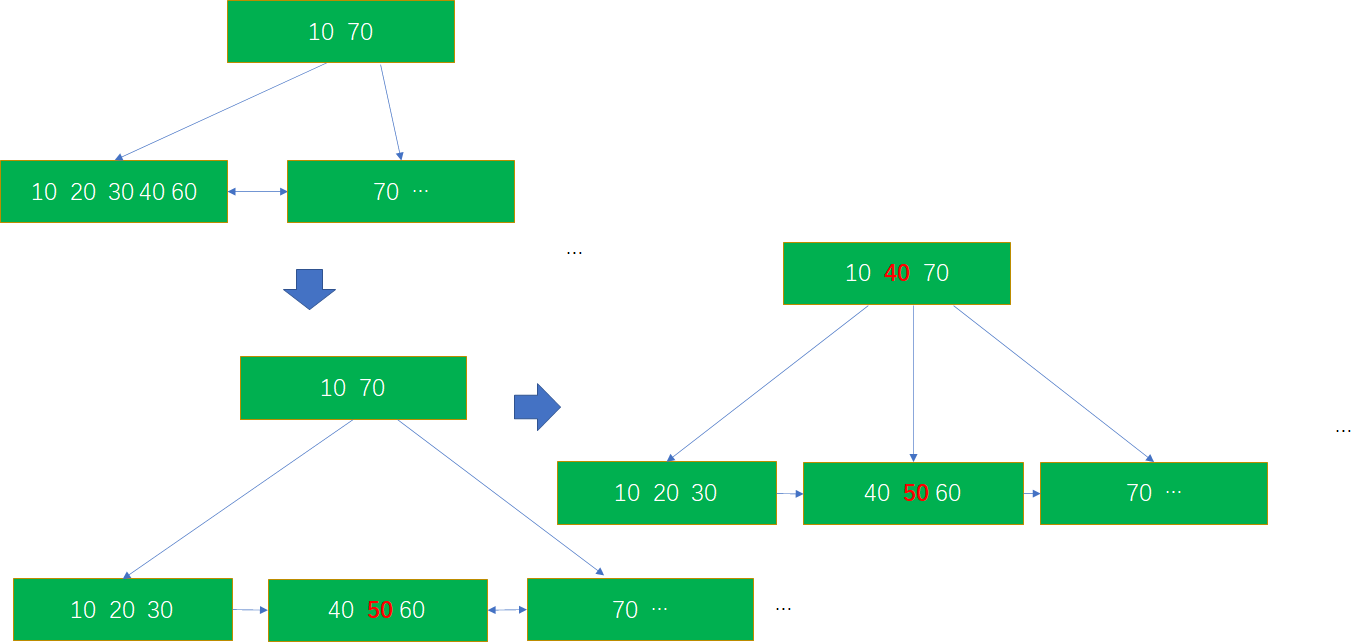
在节点发生分裂的同时,link pointer 同时建立。在 B-tree 索引的查找流程执行时,如果发现当前查找的 Key 超过了当前查找的 page 的 HK,表明在搜索过程中索引结构发生了变化,此时应该通过 link pointer 访问右侧节点。这样的实现,有时效率并不高,因为可能需要额外的磁盘操作,但正确性上没有问题,而且实际使用过程中通常分裂不会那么频繁。
搜索算法
在 B-tree 索引中查找 v,如果 v 在 B-tree 中存在,搜索流程在找到包含 v 的节点 A,以及包含指向 v 的指针的 t 时结束。否则,我们在一个数据范围包含 v 在内的页面 A 中进行查找,最终确认 v 不存在。
整个查找流程的伪代码如下:
x <- scannode(v, A) 表示在内存页A中查找v,返回一个数据指针给x。
procedure search(v)
current <- root; // 获取根节点,current 表示当前查找的page
A <- get(current); // 把对应的page加载到内存
while current is not a leaf do // 向下查找到叶子节点
begin
current <- scannode(v, A); // 找到对应的子节点
A <- current;
end;
while t <- scannode(v, A) = link ptr of A do // 如果有必要,继续向右查找
begin
current <- t;
A <- get(current)
end;
if v is in A
then
done "success"
else
done "failure"
整个查找流程执行过程像单线程执行一样,和传统的一些搜索算法不同的是,整个过程中几乎没有加锁。
插入算法
和搜索算法类似,首先需要找到插入的位置。从树的根节点开始向下查找,找到数据要插入的叶子节点。在搜索位置的过程中,记录每一层搜索到的位置最靠右的节点,形成一条 B-tree 上的搜索路径。
在找到的叶子节点插入 v,可能导致节点的分裂(这种情况下,插入是 unsafe 的),在这种情况下,对应的叶子节点 a 分裂为 a’ 和 b’,其中 a’ 与 a 是相同的物理页。由于叶子节点发生改变,需要相应地更新其父节点,通过回溯之前查找路径的方式来进行更新。进而,其父节点也可能发生分裂,因此需要逐级向上回溯更新,直到某个节点的插入不会发生分裂(插入是 safe 的)。在需要修改某个节点时,先要对其加锁。
整个流程中,通过优化锁顺序避免死锁发生。另外需要注意一点,在回溯过程中,由于节点的分裂,我们回溯到的节点,可能不是最终执行插入的节点。在这种情况下,需要通过 link pointer 找到正确的插入位置。
以下是插入算法的伪代码,其中一些流程被当作原语描述,因为它们实现比较简单,而且这些操作不是本文描述的重点。例如:
A <- node.insert(A, w, v)表示将指针 w,以及值 v 插入节点 A。
u <- allocate(1 new page for B) 表示在磁盘上申请一个新页。B 表示的页面将会通过指针 u 写入这个页。
“A,B <- rearrange old A, adding …” 表示将 A 分裂为两个新的节点 A 和 B。
以下算法描述在 B-tree 中插入值 v 的过程。
procedure insert(v)
initialize stack; // 初始化栈,记录查找路径,用于回溯
current <- root; // 从根节点开始查找
A <- get(current); // 加载页面到内存
while current is not a leaf do
begin
t <- current;
current <- scannode(v, A);
if new current was not link pointer in A then
push(t); // 记录查找路径
A <- get(current);
end;
lock(current); // 找到一个要插入的叶子节点,对节点加锁
A <- get(current);
move.right; // 如果在加锁之前,叶子节点发生了分裂,则需要通过link pointer找到正确的插入位置;否则,什么也不做
if v is in A then stop "v is already exists in tree"; // 如果已经插入
w <- pointer to pages allocated for record associated with v;
Doinsertion:
if A is safe then // 当前页面是写入safe的
begin
A <- node.insert(A, w, v); // 插入值 v ,指针 w 到 A
put(A, current); // 写page
unlock(current); // 解锁
end
else // 页面是写入unsafe,需要分裂
begin
u <- allocate(1 new page for B) // 申请新页面
A,B <- rearrange old A, adding v and w, to make 2 nodes,
where (link ptr of A, link ptrof B) <- (u, link ptr of old A)
// 分裂 原来的 A 为 A, B 插入数据 v 和 指针 w,新 A 的 link ptr指向 B,B的link ptr 指向原来 A 的link ptr
y <- max value stored in new A
put(B, u) // 写分裂后右侧页
put(A, current) // 写分裂后左侧页
oldnode <- current;
v <- y;
w <- u;
current <- pop(stack); // 开始回溯
lock(current); // 对父节点加锁
A <- get(current);
move.right; // 如果父节点发生分裂,通过link ptr向右查找
unlock(oldnode); // 子节点解锁
goto Doinsertion // 如果有必要,继续向上更新父节点
end
move.right的伪代码
procedure move.right
while t <- scannode(v, A) is a link pointer of A do
begin
lock(t); // 对右侧节点加锁
unlock(current); // 解锁左侧节点
current <- t;
A <- get(current);
end
整个流程中,最多同时有 3 个节点同时被锁住,分别是[1]发生分裂的子节点(分裂后的左侧节点),[2]父节点(发生分裂后的左侧节点),[3]父节点分裂后的右侧节点。
正确性证明
LEHMAN & YAO 在 Efficient Locking for Concurrent Operations on B-tree 中给出了算法正确性的证明。
正确性证明主要证明了两个大的问题:
- 整个流程不会出现死锁
- 最终流程结束的时候,结果是正确的。细化一点就是要证明
- 最终树的结构是正确的
- 除了正在修改树结构的这个进程外,其他进程看到的是一棵一致的 B-tree
不会出现死锁的证明
首先定义 B-tree 中节点间的一个顺序关系 (<) :
- 任意时间,如果两个节点 a 和 b,如果 a 到 根节点的距离 大于 b 到根节点的距离,则 a < b。
- a 和 b 到根节点的距离相同,如果跟随 a 的 link ptr 能够到达 b,则 a < b, 即 a 在 b 的左侧。
根据插入算法可知,在时间点 t0,如果 a < b,则在任意时间点 t > t0,a < b。因为插入流程只是简单地将一个节点 x 分裂成 x’ 和 x’’,而且
- 任意 y < x ,则 y < x'
- 任意 y,如果 x < y, 则 x'' < y
根据插入流程的加锁顺序可知,当对一个节点加锁时,不会再对 其下 或 其左 的节点加锁,因此加锁遵循了一个好的加锁顺序。由于插入是唯一会对节点加锁的流程,因此我们可以得到结论,不会出现死锁。
这里可以回顾一下死锁的几个要素:
- 互斥。资源同时只能被一个进程持有。
- 请求与保持。请求其他资源时,不释放当前持有的资源。
- 不剥夺。不能再对方未释放资源时,抢占其占有的资源。
- 循环等待。多个进程形成一种相互等待对方释放资源的关系。
- 由于插入过程,上下两层都是先对子加锁,再对父加锁;同一层,是先加左侧,再加右侧,因此在加锁顺序上避免了循环等待的情况,可以避免死锁。
B-tree 结构正确性证明
为确保树结构正确,需要关注会修改树结构的操作。只有写操作会修改树结构,在插入算法的伪代码中有 3 个地方会执行 put 操作。
put(A, current) 用于向一个写 safe 的节点写入数据。
put(B, u) 用于向一个写 unsafe 的节点写入数据。在这个操作中,向分裂后的右侧节点写入数据。
put(A, current) 用于向一个写 unsafe 的节点写入数据。在这个操作中,向分裂后的左侧节点写入数据,同时修改节点的 link ptr 指向分裂后的右侧节点。
算法中,在 put(B, u) 之后紧接着执行 put(A, current),这种执行顺序将两个 put 减少为一次操作。下面证明 “put(B, u); put(A, current)” 对 B-tree 结构来说是一次修改。
证明:
假设两次 put 操作 分别修改节点 b 和 a。执行 put(B, u)时,其他节点都没有指向节点 b 的指针,因此 put 操作不会对 B-tree 结构有影响。
执行 put(A, current)时,会修改节点 a 的结构,同时还会修改节点 a 的 link ptr 指向节点 b。此时节点 b 已经存在,且 b 的 link ptr 指向 a 节点分裂前 link ptr 指向的节点。这样同时实现了 修改节点 a,将节点 b 加入 B-tree 两个效果。
由于 put(B, u)不修改 B-tree 结构,put(A, current)只修改 a 节点(内容 和 link ptr),对 B-tree 来说是一次修改。
下面给出所有操作正确修改 B-tree 结构的证明:
- Case 1: put(A, current) 修改一个写 safe 的节点,操作加锁修改 B-tree 节点,且不改变 B-tree 结构,正确性可以保证。
- Case 2: put(B, u) 操作不修改 B-tree 结构,不会出错。
- Case 3: put(A, current)修改写 unsafe 的节点。操作既修改当前节点 a 的内容,同时把节点 b 加入到 B-tree 结构中。和 Case 1 类似,节点 a 在执行 put(A, current)时已经加锁,根据之前的证明可以知道,这次操作可以保证树结构的正确性(加锁修改 B-tree 中的一个节点)。
交互正确性证明
上面证明了写操作能保证 B-tree 结构的正确性。剩下还需要证明,在读写并发执行时如果有插入操作导致 B-tree 结构发生变化,其他读写进程仍可以正确执行。因为读操作不会改变 B-tree 结构,因此只需要证明写操作不会影响其他进程操作结果的正确性。细分一下,需要证明[1]写操作不会影响其他读操作的正确性,[2]写操作不会影响其他写操作的正确性。
以下过程中我们提到的操作都是原子的。
假设 t0 时刻,一个写进程对节点 a 执行一次 put 操作,在 t’ 时刻其他进程从磁盘读取节点 a。
如果 t’ > t0,则写操作不会影响读操作的正确性。
证明:
假设节点 a 是查找路径上的一个节点,则在到达 a 节点之前的查找路径不会受节点 a 插入的影响;同时,之前已经证明插入操作可以保证 B-tree 结构的正确性,所以任意时刻 t’ > t0,从节点 a 向下的查找路径也不会受插入的影响。综上,任意时刻 t’ > t0,查找不会受插入的影响。
将写操作对节点的修改分为以下 3 种:
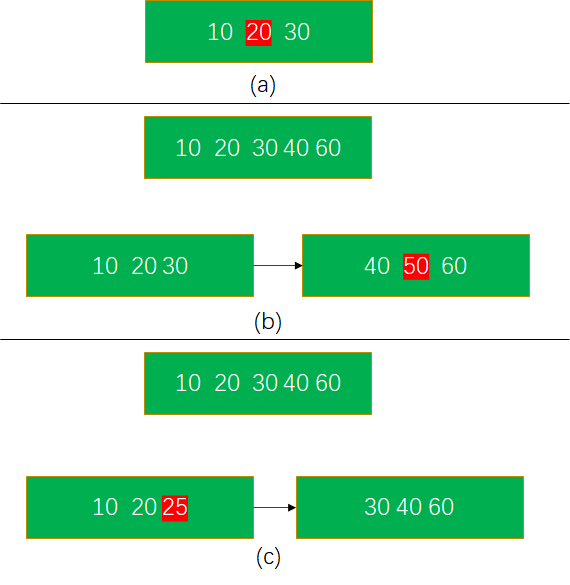
- Type 1: 节点是写 safe 的,简单地将插入的数据及对应的指针插入节点。
- Type 2: 节点是写 unsafe 的,插入数据导致节点分裂,插入的数据在分裂后左侧节点。
- Type 3: 节点是写 unsafe 的,插入数据导致节点分裂,插入的数据在分裂后右侧节点。
上面证明了任意时刻 t’ > t0,查找不会受插入的影响。下面考虑 t’ < t0 的情况。
Type 1: 节点 n 是写 safe 的。如果节点 n 是叶子节点,则插入操作不会修改任何已存在的指针,则查询的结果等价于插入进程执行之前串行执行查询。如果节点 n 是非叶子节点,则节点 n 的插入是由其子节点分裂导致。假设其子节点 I 分裂为 I’ 和 m’,其中唯一可能出现的交叉执行是查询进程获得了 n 指向 I 的指针,然后插入导致 I 分裂为 I’ 和 m’,原来指向 I 的指针,现在指向 I’。这种情况下,查询进程通过 I’ 的 link ptr 可以查询到 m’,因此查询结果是正确的。
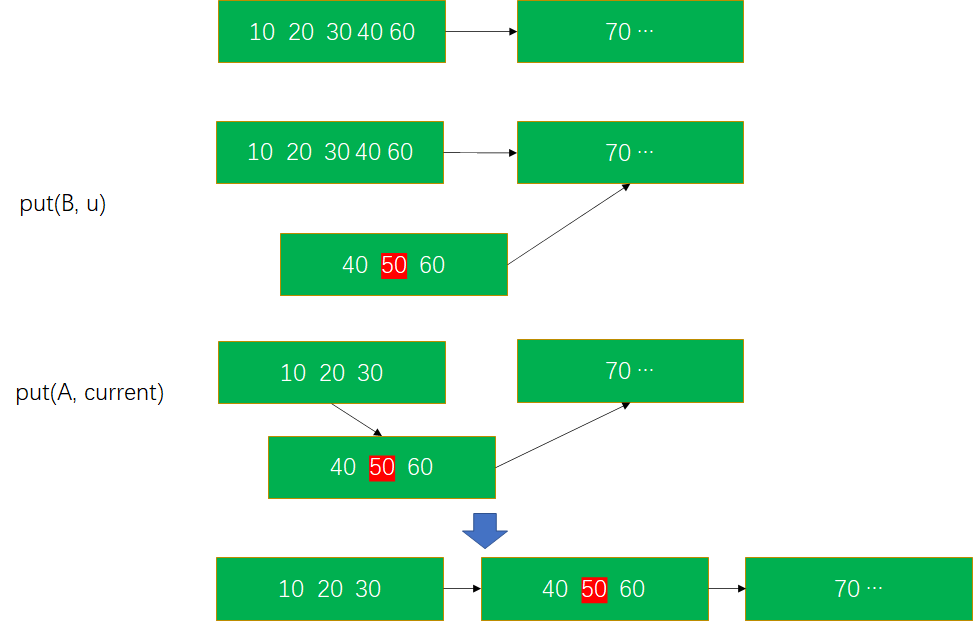
Type 2、3: 插入导致节点 n 分裂为 n1’ 和 n2’。如果 n 是叶子节点,则查找 n 和查找 n1’ 及 n2’ 的结果是一致的,除了新插入的数据可能查不到。如果 n 是非叶子节点, 则 n 的分裂是由子节点的分裂导致。节点 n 分裂为 n1’ 和 n2’,分裂后的两个节点拥有和 n 一样的一组指针以及新插入的节点信息。从节点 n 向下查找能到达的节点,与通过节点 n1’ 及其 指向 n2’ 的 link ptr 是一致的。例外的情况是,查询读取节点 n 时,本来如果新指针已经插入,查询应该使用新指针;但由于当前新指针还未插入,查询实际使用的是新指针左侧的指针,如图-4 所示。
如果 n 已经分裂,则查询数据应该跟随图中标红的路径,直接找到对应子节点。由于查询执行时,新指针还未插入,因此实际查找路径为图中标蓝的路径。在这种情况下,还需要通过 link ptr 才能找到正确的节点,最终结果都是正确的。
图 4 节点分裂前后查找路径的差异(a)
<img src='<./figures/节点分裂前后查找路径的差异(a).png>)
.B57oSxqN.png)
上面证明了查询操作和写操作并发时,最终不会影响查询结果的正确性。还需要证明,两个写操作并发时,相互之间不会影响正确性。
假设插入进程 I 和 插入进程 I’ 并发执行,则 I’ 可能处于[1]查找插入节点的阶段,可能是[2]已经完成插入在向上回溯更新,也可能[3]正在节点上执行插入操作。
- [1]如果是正在查找插入节点,上面已经证明写操作不会影响查询结果的正确性,所以相互之间不影响正确性。
- [2]对于节点 n 而言,回溯到节点 n 是由于其子节点发生分裂,需要在 n 中插入新生成的子节点信息。从 n 加入回溯栈,到回溯到 n 这段时间,节点 n 由于其他并发操作,例如由于 I 的插入发生分裂。由于节点 n 分裂后的节点都在原节点的右侧,通过 link ptr 可以到达,因此插入算法最终能找到正确的位置。
- [3] 如果 I’ 打算在节点 n 上插入,需要先对 n 加锁。但此时 I 已经先对 n 加锁,最终 I’ 等到 I 释放锁,完成加锁动作,再加载节点 n。如果节点 n 没有发生分裂,则 I’ 直接在 n 中执行插入; 如果节点 n 发生了分裂,则跟随 link ptr 能找到正确插入位置。
最终的完整算法可能存在 LiveLock 的问题,即一个进程无休止地运行,因为它必须跟随其他进程所创建的 link ptr。在一个多核系统中,如果进程跑在一个相对运行非常慢的核上就可能出现这个问题。
但这个问题在实践中出现的可能性极小,因为:
- 大多数多核系统中,每个核的性能差别不大。
- 实际使用中 B-tree 节点的创建和删除所占的时间并不多,即使有一个核非常慢,需要跟随的 link ptr 也并不多。
- B-tree 每一层能创建的节点数有限制,所以需要跟随的 link ptr 并不是无上限的。
如何完全避免 LiveLock 超出本文的讨论范围,因此不过多展开了。
删除
通常如果 B-tree 节点中数据少于 k 个 entry 可能触发节点合并,一种简单的处理删除的方式是允许 B-tree 叶子节点少于 k 个 entry。非叶子节点只是用于判断数据范围,因此没有必要执行删除动作。
删除操作的流程和插入非常类似,首先查找到对应的叶子节点,然后对叶子节点加锁,数据加载到内存,执行删除数据的动作,最后回写。
正确性的证明和插入类似,这里不赘述了。
锁效率
显然,在并发执行过程中,为了保证数据安全,加锁是必要的。之前讲插入流程时说到,一个进程同时最多会锁定三个节点。实际这种情况发生的概率并不大,因为每个节点都容量都很大,除非有非常的并发进程在执行。因此实际使用过程中,锁冲突出现的概率并不大。
以上是关于 openGauss 的 B-tree 索引并发的理论部分,下一篇我们结合 openGauss 的代码看一下实现。