openGauss
开源数据库
openGauss社区官网
开源社区
如何插件化地为openGauss添加算子
1. openGauss 算子概述
1.1 openGauss 执行算子汇总
openGauss 的算子按类型可分为四类:控制算子、连接算子、扫描算子和物化算子。下面汇总了当前(openGauss2.0.0)已有的算子。
| 算子 | 文件 | 类型 |
|---|---|---|
| Agg | nodeAgg.cpp | 物化算子 |
| Append | nodeAppend.cpp | 控制算子 |
| BitmapAnd | nodeBitmapAnd.cpp | 控制算子 |
| BitmapHeapscan | nodeBitmapHeapscan.cpp | 扫描算子 |
| BitmapIndexscan | nodeBitmapIndexscan.cpp | 扫描算子 |
| BitmapOr | nodeBitmapOr.cpp | 控制算子 |
| Ctescan | nodeCtescan.cpp | 扫描算子 |
| Foreignscan | nodeForeignscan.cpp | 扫描算子 |
| Functionscan | nodeFunctionscan.cpp | 扫描算子 |
| Group | nodeGroup.cpp | 物化算子 |
| Hash | nodeHash.cpp | 物化算子 |
| Hashjoin | nodeHashjoin.cpp | 连接算子 |
| Indexonlyscan | nodeIndexonlyscan.cpp | 扫描算子 |
| Indexscan | nodeIndexscan.cpp | 扫描算子 |
| Limit | nodeLimit.cpp | 物化算子 |
| LockRows | nodeLockRows.cpp | 控制算子 |
| Material | nodeMaterial.cpp | 物化算子 |
| MergeAppend | nodeMergeAppend.cpp | 控制算子 |
| Mergejoin | nodeMergejoin.cpp | 连接算子 |
| ModifyTable | nodeModifyTable.cpp | 控制算子 |
| Nestloop | nodeNestloop.cpp | 连接算子 |
| PartIterator | nodePartIterator.cpp | 连接算子 |
| Recursiveunion | nodeRecursiveunion.cpp | 控制算子 |
| Result | nodeResult.cpp | 控制算子 |
| Samplescan | nodeSamplescan.cpp | 扫描算子 |
| Seqscan | nodeSeqscan.cpp | 扫描算子 |
| SetOp | nodeSetOp.cpp | 物化算子 |
| Sort | nodeSort.cpp | 物化算子 |
| Stub | nodeStub.cpp | 控制算子 |
| Subplan | nodeSubplan.cpp | 控制算子 |
| Subqueryscan | nodeSubqueryscan.cpp | 扫描算子 |
| Tidscan | nodeTidscan.cpp | 扫描算子 |
| Unique | nodeUnique.cpp | 物化算子 |
| Valuesscan | nodeValuesscan.cpp | 扫描算子 |
| WindowAgg | nodeWindowAgg.cpp | 物化算子 |
| Worktablescan | nodeWorktablescan.cpp | 扫描算子 |
| Extensible | nodeExtensible.cpp | 用于扩展算子 |
1.2 PG 新增算子汇总
下面列出 PG(14devel)相比于 openGauss 多了哪些算子。
| 算子 | 文件 | 类型 |
|---|---|---|
| Custom | nodeCustom.c | |
| Gather | nodeGather.c | |
| GatherMerge | nodeGatherMerge.c | |
| IncrementalSort | nodeIncrementalSort.c | |
| Namedtuplestorescan | nodeNamedtuplestorescan.c | |
| ProjectSet | nodeProjectSet.c | |
| TableFuncscan | nodeTableFuncscan.c | |
| Tidrangescan | nodeTidrangescan.c |
2. 算子插件(TidRangeScan)
1.1 表格中的算子 Extensible 类似于 PG 的算子 Custom,其作用是允许插件向数据库增加新的扫描类型。主要分为三步:
首先,在路径规划期间生成插件增加的扫描路径(ExtensiblePath);
然后,如果优化器选择该路径作为最优路径,那么需要生成对应的计划(ExtensiblePlan);
最后,必须提供执行该计划的能力(ExtensiblePlanState)。
下面以 TidRangeScan 为示例,演示如何使用 Extensible 通过插件化的方式为 openGauss 新增一个执行算子。
2.1 功能介绍
openGauss 中堆表由一个个 page 组成,每个 page 包含若干个 tuple。tid 是 tuple 的寻址地址,由两个字段组成:(pageid,itemid),pageid 代表第几个数据块,itemid 代表这个 page 内的第几条记录。例如 tid=(10,1)表示第 11 个数据块中的第一条记录(pageid 从 0 开始,itemid 从 1 开始)。
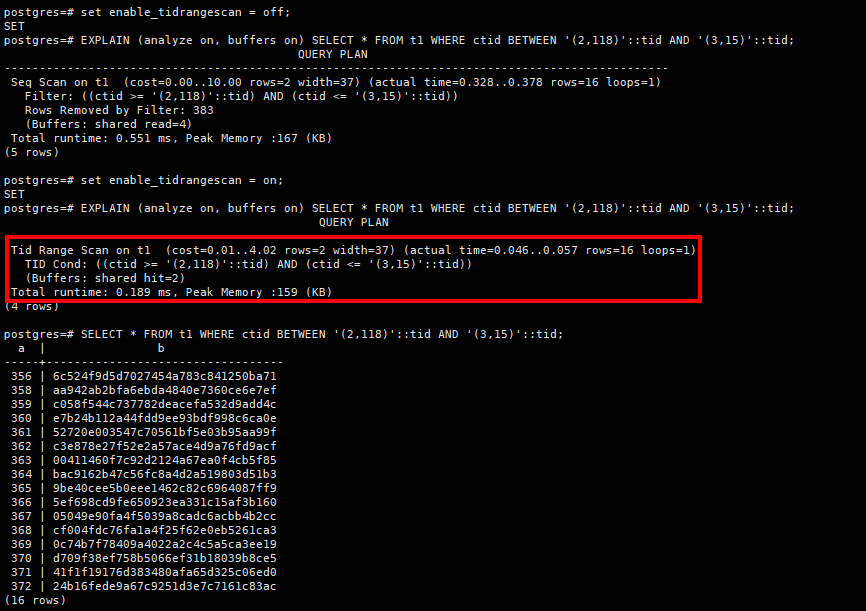
PostgreSQL 14 devel 新增了算子 TidRangeScan,可以直接通过 tid 来范围访问某个 page 的全部数据。(带来的好处:如果需要更新一张表所有数据时,可以开启多个会话并行去更新不同的 page,提高效率。)
本次展示将该特性通过插件的方式移植到 openGauss,插件化的增加一个执行算子。
2.2 使用说明
tidrangescan 插件定义了一个 bool 类型的 guc 参数:enable_tidrangescan,控制优化器对 tidrangescan 扫描算子的使用,on 表示使用,off 表示不使用。
2.3 插件边界
本小节主要列举调用了哪些内核接口,当内核演进过程中修改了这些接口,有可能会影响插件的使用。
| 接口名 | 文件 | 模块 |
|---|---|---|
| ExecInitExpr | execQual.cpp | 优化层 |
| clauselist_selectivity | clausesel.cpp | 优化层 |
| cost_qual_eval | costsize.cpp | 优化层 |
| get_tablespace_page_costs | spccache.cpp | 优化层 |
| get_baserel_parampathinfo | relnode.cpp | 优化层 |
| add_path | pathnode.cpp | 优化层 |
| extract_actual_clauses | restrictinfo.cpp | 优化层 |
| heap_getnext | heapam.cpp | 执行层 |
| ExecClearTuple | execTuples.cpp | 执行层 |
| ExecStoreTuple | execTuples.cpp | 执行层 |
| ExecScanReScan | execScan.cpp | 执行层 |
| heap_beginscan | heapam.cpp | 执行层 |
| heap_rescan | heapam.cpp | 执行层 |
| ExecScan | execScan.cpp | 执行层 |
| heap_endscan | heapam.cpp | 执行层 |
| make_ands_explicit | clauses.cpp | 执行层 |
| deparse_context_for_planstate | ruleutils.cpp | 执行层 |
| deparse_expression | ruleutils.cpp | 执行层 |
| ExplainPropertyText | explain.cpp | 执行层 |
2.4 设计实现
本节提到的 hook 在第 3 章《hook 点总述》会做详细说明。
附社区 PR:https://gitee.com/opengauss/Plugin/pulls/1
2.4.1 插件开发通用流程
2.4.1.1 Makefile
在 openGauss 源码的 contrib 目录下新建开发插件的目录,这里为 tidrangescan。在该目录下新建 Makefile 文件。
# contrib/tidrangescan/Makefile
MODULES = tidrangescan # 模块名
EXTENSION = tidrangescan # 扩展的名称
REGRESS = tidrangescan # 回归测试
REGRESS_OPTS = --dlpath=$(top_builddir)/src/test/regress -c 0 -d 1 --single_node # 回归测试相关的选项
DATA = tidrangescan--1.0.sql # 插件安装的SQL文件
override CPPFLAGS :=$(filter-out -fPIE, $(CPPFLAGS)) –fPIC # fPIC选项
# 以下是openGauss构建插件相关的命令,保留即可
ifdef USE_PGXS
PG_CONFIG = pg_config
PGXS := $(shell $(PG_CONFIG) --pgxs)
include $(PGXS)
else
subdir = contrib/tidrangescan
top_builddir = ../..
include $(top_builddir)/src/Makefile.global
include $(top_srcdir)/contrib/contrib-global.mk
endif
2.4.1.2 control 文件
新建控制文件,这里为 tidrangescan.control。内容如下:
# tidrangescan extension
comment = 'example implementation for custom-scan-provider interface' default_version = '1.0' # 与Makefile里DATA属性的sql文件名的版本保持一致 module_pathname = '$libdir/tidrangescan'
relocatable = true
2.4.1.3 sql 文件
sql 文件命名格式为extensionName--version.sql,version即为上述版本号,这里为tidrangescan--1.0.sql。在这里编写所需的函数。
-- complain if script is sourced in psql, rather than via CREATE EXTENSION
\echo Use "CREATE EXTENSION tidrangescan" to load this file. \quit
CREATE FUNCTION pg_catalog.tidrangescan_invoke() RETURNS VOID AS '$libdir/tidrangescan','tidrangescan_invoke' LANGUAGE C STRICT;
2.4.1.4 回归测试用例
创建 sql 和 expected 目录,分别存放测试用例的 sql 脚本和预期输出,例如这里为 tidrangescan.sql 和 tidrangescan.out。
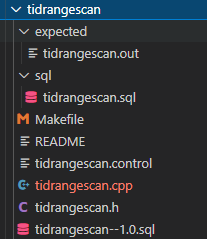
2.4.1.5 源文件及插件目录总览
创建插件的头文件和 cpp 文件,这是实现插件的核心,下文主要介绍该插件代码层的设计与实现。
至此插件总体目录概览如下。
2.4.2 优化器
2.4.2.1 添加路径
将 set_rel_pathlist_hook 赋值为 SetTidRangeScanPath,该函数解析扫描表的查询条件,当存在 tid 范围查询时调用 add_path 添加 ExtensiblePath,计算代价,并将创建计划的接口 tidrangescan_path_methods 存入 path 中。
static void SetTidRangeScanPath(PlannerInfo *root, RelOptInfo *baserel, Index rtindex, RangeTblEntry *rte)
{
...
tidrangequals = TidRangeQualFromRestrictInfoList(baserel->baserestrictinfo, baserel);
...
if (tidrangequals != NIL) {
cpath = (ExtensiblePath*)palloc0(sizeof(ExtensiblePath));
cpath->path.type = T_ExtensiblePath;
cpath->path.pathtype = T_ExtensiblePlan;
cpath->path.parent = baserel;
cpath->extensible_private = tidrangequals;
cpath->methods = &tidrangescan_path_methods;
cost_tidrangescan(&cpath->path, root, baserel, tidrangequals, cpath->path.param_info);
add_path(root, baserel, &cpath->path);
}
}
static ExtensiblePathMethods tidrangescan_path_methods = {
"tidrangescan", /* ExtensibleName */
PlanTidRangeScanPath, /* PlanExtensiblePath */
};
2.4.2.2 创建计划
上述的 tidrangescan_path_methods 定义了创建计划函数 PlanTidRangeScanPath,根据最优路径生成计划 ExtensiblePlan,同时将创建计划状态节点接口 tidrangescan_scan_methods 存入 plan。
static Plan *PlanTidRangeScanPath(PlannerInfo *root, RelOptInfo *rel, ExtensiblePath *best_path, List *tlist, List *clauses, List *custom_plans)
{
ExtensiblePlan *node = makeNode(ExtensiblePlan);
Plan *plan = &node->scan.plan;
List *tidrangequals = best_path->extensible_private;
...
node->extensible_exprs = tidrangequals;
node->scan.plan.startup_cost = best_path->path.startup_cost;
node->scan.plan.total_cost = best_path->path.total_cost;
node->scan.plan.plan_rows = best_path->path.rows;
node->scan.plan.plan_width = rel->width;
node->methods = &tidrangescan_scan_methods;
return plan;
}
static ExtensiblePlanMethods tidrangescan_scan_methods = {
"tidrangescan", /* ExtensibleName */
CreateTidRangeScanState, /* CreateExtensiblePlanState */
};
2.4.3 执行器
2.4.3.1 创建计划状态节点
上述的 tidrangescan_scan_methods 定义了创建 PlanState 函数 CreateTidRangeScanState,根据传入的 plan 返回 PlanState,同样将后续执行器执行的若干方法结构体 tidrangescan_exec_methods 存入 PlanState。
Node *CreateTidRangeScanState(ExtensiblePlan *custom_plan)
{
TidRangeScanState *tidrangestate;
/*
* create state structure
*/
tidrangestate = (TidRangeScanState*)palloc0(sizeof(TidRangeScanState));
NodeSetTag(tidrangestate, T_ExtensiblePlanState);
tidrangestate->css.methods = &tidrangescan_exec_methods;
/*
* mark scan as not in progress, and TID range as not computed yet
*/
tidrangestate->trss_inScan = false;
return (Node*)&tidrangestate->css;
}
static ExtensibleExecMethods tidrangescan_exec_methods = {
"tidrangescan", /* ExtensibleName */
BeginTidRangeScan, /* BeginExtensiblePlan */
ExecTidRangeScan, /* ExecExtensiblePlan */
EndTidRangeScan, /* EndExtensiblePlan */
ExecReScanTidRangeScan, /* ReScanExtensiblePlan */
ExplainTidRangeScan /* ExplainExtensiblePlan */
};
2.4.3.2 执行层 hook
tidrangescan_exec_methods 定义了五个接口,分别是执行层各个阶段的主函数:BeginTidRangeScan、ExecTidRangeScan、EndTidRangeScan、ExecReScanTidRangeScan、ExplainTidRangeScan。
static void BeginTidRangeScanScan(ExtensiblePlanState *node, EState *estate, int eflags)
{
TidRangeScanState *ctss = (TidRangeScanState *) node;
ExtensiblePlan *cscan = (ExtensiblePlan *) node->ss.ps.plan;
ctss->css.ss.ss_currentScanDesc = NULL; /* no table scan here */
/*
* initialize child expressions
*/
ctss->css.ss.ps.qual = (List*)ExecInitExpr((Expr*)cscan->scan.plan.qual, (PlanState *)ctss);
TidExprListCreate(ctss);
}
static TupleTableSlot * ExecTidRangeScan(ExtensiblePlanState *pstate)
{
return ExecScan(&pstate->ss, (ExecScanAccessMtd) TidRangeNext, (ExecScanRecheckMtd) TidRangeRecheck);
}
static void EndTidRangeScan(ExtensiblePlanState *node)
{
TableScanDesc scan = node->ss.ss_currentScanDesc;
if (scan != NULL)
heap_endscan(scan);
/*
* Free the exprcontext
*/
ExecFreeExprContext(&node->ss.ps);
/*
* clear out tuple table slots
*/
if (node->ss.ps.ps_ResultTupleSlot)
ExecClearTuple(node->ss.ps.ps_ResultTupleSlot);
ExecClearTuple(node->ss.ss_ScanTupleSlot);
}
static void ExecReScanTidRangeScan(ExtensiblePlanState *node)
{
/* mark scan as not in progress, and tid range list as not computed yet */
((TidRangeScanState*)node)->trss_inScan = false;
/*
* We must wait until TidRangeNext before calling table_rescan_tidrange.
*/
ExecScanReScan(&node->ss);
}
static void ExplainTidRangeScan(ExtensiblePlanState *node, List *ancestors, ExplainState *es)
{
TidRangeScanState *ctss = (TidRangeScanState *) node;
ExtensiblePlan *cscan = (ExtensiblePlan *) ctss->css.ss.ps.plan;
/* logic copied from show_qual and show_expression */
if (cscan->extensible_exprs) {
bool useprefix = es->verbose;
Node *qual;
List *context;
char *exprstr;
/* Convert AND list to explicit AND */
qual = (Node *) make_ands_explicit(cscan->extensible_exprs);
/* Set up deparsing context */
context = deparse_context_for_planstate((Node*)ctss, ancestors, es->rtable);
/* Deparse the expression */
exprstr = deparse_expression(qual, context, useprefix, false);
/* And add to es->str */
ExplainPropertyText("tid range quals", exprstr, es);
}
}
2.4.4 改造点
2.4.4.1 无法调用内核 static 函数
在移植过程中,受限于插件实现的方式,无法调用内核的 static 函数,需要拷贝到插件侧或者对原有的代码作改造。
执行层获取单个 tuple 阶段,PG 在 heapam.c 中定义了一个函数 heap_getnextslot_tidrange,其中调用了 static 函数 heapgettup_pagemode 和 heapgettup。在将 heap_getnextslot_tidrange 搬到 openGauss 插件时,由于无法调用这两个 static 函数,需要将其改为调用 heap_getnext,通过 heap_getnext 访问 heapgettup_pagemode 和 heapgettup。
3. hook 点总述
3.1 优化器
3.1.1 添加路径
通常用来产生 ExtensiblePath 对象,并使用 add_path 把它们加入到 rel 中。
插入位置所在的函数:set_rel_pathlist
typedef void (*set_rel_pathlist_hook_type) (PlannerInfo *root,
RelOptInfo *rel,
Index rti,
RangeTblEntry *rte);
extern THR_LOCAL PGDLLIMPORT set_rel_pathlist_hook_type set_rel_pathlist_hook;
ExtensiblePath 定义如下。
typedef struct ExtensiblePath {
Path path;
uint32 flags; /* mask of EXTENSIBLEPATH_* flags */
List* extensible_paths; /* list of child Path nodes, if any */
List* extensible_private;
const struct ExtensiblePathMethods* methods;
} ExtensiblePath;
flags 是一个标识,如果该自定义的路径支持反向扫描,则它应该包括 EXTENSIBLEPATH_SUPPORT_BACKWARD_SCAN,如果支持标记和恢复则包括 EXTENSIBLEPATH_SUPPORT_MARK_RESTORE。
extensible_paths 是这个自定义路径节点的子 Path 节点列表
extensible_private 可用来存储该自定义路径的私有数据。
methods 必须包含根据该路径生成计划的方法。ExtensiblePathMethods 结构如下,主要实现 PlanExtensiblePath。
typedef struct ExtensiblePathMethods {
const char* ExtensibleName;
/* Convert Path to a Plan */
struct Plan* (*PlanExtensiblePath)(PlannerInfo* root, RelOptInfo* rel, struct ExtensiblePath* best_path,
List* tlist, List* clauses, List* extensible_plans);
} ExtensiblePathMethods;
3.1.2 添加连接路径
提供连接路径,同样创建 ExtensiblePath 路径。
插入位置所在的函数:add_paths_to_joinrel
typedef void (*set_join_pathlist_hook_type) (PlannerInfo *root,
RelOptInfo *joinrel,
RelOptInfo *outerrel,
RelOptInfo *innerrel,
JoinType jointype,
SpecialJoinInfo *sjinfo,
Relids param_source_rels,
SemiAntiJoinFactors *semifactors,
List *restrictlist);
extern THR_LOCAL PGDLLIMPORT set_join_pathlist_hook_type set_join_pathlist_hook;
3.1.3 创建计划
调用上述 ExtensiblePath 中的 methods 定义的接口 PlanExtensiblePath,将自定义路径转换为一个完整的计划,返回 ExtensiblePlan。
插入位置所在的函数:create_scan_plan->create_extensible_plan
typedef struct ExtensiblePlan {
Scan scan;
uint32 flags; /* mask of EXTENSIBLEPATH_* flags, see relation.h */
List* extensible_plans; /* list of Plan nodes, if any */
List* extensible_exprs; /* expressions that extensible code may evaluate */
List* extensible_private; /* private data for extensible code */
List* extensible_plan_tlist; /* optional tlist describing scan
* tuple */
Bitmapset* extensible_relids; /* RTIs generated by this scan */
ExtensiblePlanMethods* methods;
} ExtensiblePlan;
和 ExtensiblePath 一样,flags 同样是一个标识。
extensible_plans 可以用来存放子 Plan 节点
extensible_exprs 用来存储需要由 setrefs.cpp 和 subselect.cpp 修整的表达式树。
extensible_private 用来存储只有该自定义算子使用的私有数据。
extensible_plan_tlist 描述目标列
extensible_relids 为该扫描节点要处理的关系集合
methods 必须包含生成该计划对应的计划节点 PlanState 的方法。ExtensiblePlanMethods 结构如下,主要实现 CreateExtensiblePlanState。
typedef struct ExtensiblePlanMethods {
char* ExtensibleName;
/* Create execution state (ExtensiblePlanState) from a ExtensiblePlan plan node */
Node* (*CreateExtensiblePlanState)(struct ExtensiblePlan* cscan);
} ExtensiblePlanMethods;
3.2 执行器
3.2.1 创建计划状态节点
调用上述 ExtensiblePlanMethods 中的 methods 定义的接口 CreateExtensiblePlanState,为这个 ExtensiblePlan 分配一个 ExtensiblePlanState。
插入位置所在的函数:ExecInitNodeByType->ExecInitExtensiblePlan
typedef struct ExtensiblePlanState {
ScanState ss;
uint32 flags; /* mask of EXTENSIBLEPATH_* flags, see relation.h */
List* extensible_ps; /* list of child PlanState nodes, if any */
const ExtensibleExecMethods* methods;
} ExtensiblePlanState;
flags 含义同 ExtensiblePath 和 ExtensiblePlan 一样
extensible_ps 为该计划节点的子节点。
methods 为包含多个执行所需接口的结构体 ExtensibleExecMethods,在下文做具体介绍。
3.2.2 执行层 hook
上面 CustomScanState 的成员 CustomExecMethods 定义了几个 hook 点
typedef struct ExtensibleExecMethods {
const char* ExtensibleName;
/* Executor methods: mark/restore are optional, the rest are required */
void (*BeginExtensiblePlan)(struct ExtensiblePlanState* node, EState* estate, int eflags);
TupleTableSlot* (*ExecExtensiblePlan)(struct ExtensiblePlanState* node);
void (*EndExtensiblePlan)(struct ExtensiblePlanState* node);
void (*ReScanExtensiblePlan)(struct ExtensiblePlanState* node);
void (*ExplainExtensiblePlan)(struct ExtensiblePlanState* node, List* ancestors, struct ExplainState* es);
} ExtensibleExecMethods;
- BeginExtensiblePlan 完成所提供的 ExtensiblePlanState 的初始化。标准的域已经被 ExecInitExtensiblePlan 初始化,但是任何私有的域应该在这里被初始化。
插入位置所在的函数:ExecInitNodeByType->ExecInitExtensiblePlan
- ExecExtensiblePlan 执行扫描,取下一个扫描元组,如果还有任何元组剩余,它应该用当前扫描方向的下一个元组填充 ps_ResultTupleSlot,并且接着返回该元组槽。如果没有,则用 NULL 填充或者返回一个空槽。
插入位置所在的函数:ExecProcNode->ExecProcNodeByType
- EndExtensiblePlan 清除任何与 ExtensiblePlanState 相关的私有数据。这个方法是必需的,但是如果没有相关的数据或者相关数据将被自动清除,则它不需要做任何事情。
插入位置所在的函数:ExecEndNodeByType->ExecEndExtensiblePlan
- ReScanExtensiblePlan 把当前扫描倒回到开始处,并且准备重新扫描该关系。
插入位置所在的函数:ExecReScan->ExecReScanByType
- ExplainExtensiblePlan 为一个自定义扫描计划节点的 EXPLAIN 输出额外的信息。这个回调函数是可选的。即使没有这个回调函数,被存储在`ScanState 中的公共的数据(例如目标列表和扫描关系)也将被显示,但是该回调函数允许显示额外的信息(例如私有状态)。
插入位置所在的函数:ExplainNode->show_pushdown_qual