openGauss
开源数据库
openGauss社区官网
开源社区
初探磐维数据库switchover实现机制
2024-05-19openGauss开发入门磐维
初探磐维数据库switchover实现机制
磐维数据库作为一款高可靠的企业级关系型数据库,支持一主多备、级联备等灵活的部署结构,主备之间可以通过switchover进行角色切换,主机故障后也可以通过failover对备机进行升主。
switchover执行过程
在需要升主的备节点执行以下命令,会触发主备切换操作:
gs_ctl switchover -D /home/omm/cluster/dn1/
switchover执行涉及到如下线程:
- postmaster:数据库主线程。主要有两个功能:一是对连接进行监听,接收新的连接;二是监控所有子线程的状态,并且根据子线程退出状态进行处理,如果线程是FATAL退出,则重新拉起子线程。如果线程是PANIC退出,则进行整个数据库重新初始化,保证数据库的正常运行。
- startup: 数据库启动线程。数据库启动时postmaster主线程拉起的第一个子线程,主要完成数据库的日志REDO操作。日志REDO操作结束,如果不是备机,则Startup线程退出。如果是备机,那么Startup线程一直运行,持续REDO备机接收到的新日志。
- walsender:主要用于主节点发送WAL日志记录到备节点。
- walreceiver:主要用于备节点接收主节点的WAL日志记录。
switchover主备切换执行过程如下图所示:
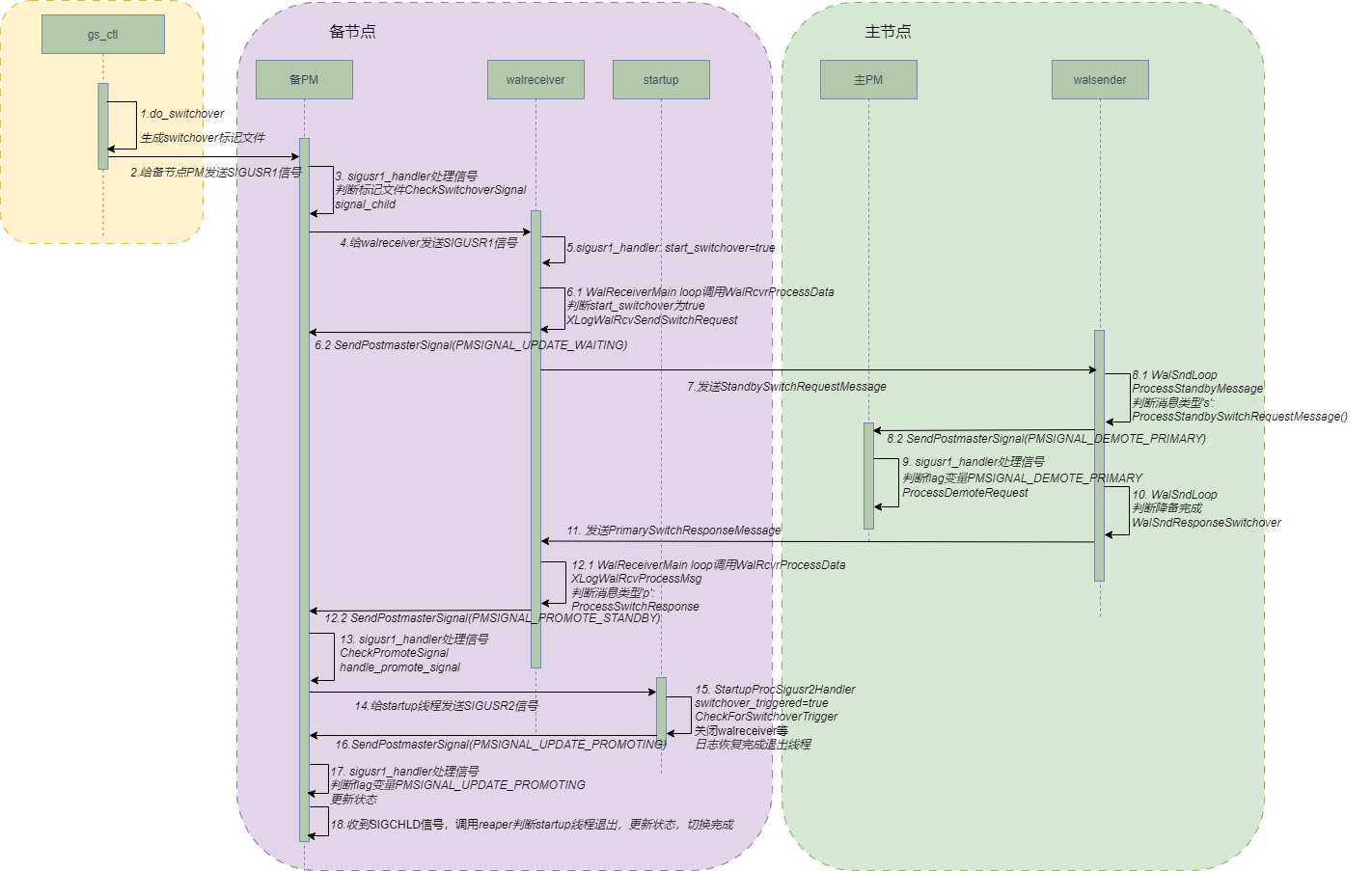
switchover核心步骤如下:
- gs_ctl工具执行switchover命令时调用do_switchover,在备节点的数据目录生成switchover文件,同时向备节点的postmaster主线程发送SIGUSR1信号。
c++
//pg_ctl.cpp
static void do_switchover(uint32 term)
{
FILE* sofile = NULL;
pgpid_t pid;
ServerMode run_mode;
ServerMode origin_run_mode;
……
if ((sofile = fopen(switchover_file, "w")) == NULL) {
pg_log(
PG_WARNING, _(" could not create switchover signal file \"%s\": %s\n"), switchover_file, strerror(errno));
exit(1);
}
……
sig = SIGUSR1;
if (kill((pid_t)pid, sig) != 0) {
pg_log(PG_WARNING, _(" could not send switchover signal (PID: %ld): %s\n"), pid, strerror(errno));
if (unlink(switchover_file) != 0)
pg_log(PG_WARNING, _(" could not send switchover signal (PID: %ld): %s\n"), pid, strerror(errno));
exit(1);
}
……
}
- 备节点postmaster收到SIGUSR1信号,会调用sigusr1_handler函数,判断switchover文件是否存在,存在的话则正式开始进入switchover流程,给walreceiver发送SIGUSR1信号。
c++
//postmaster.cpp
static void sigusr1_handler(SIGNAL_ARGS)
{
int mode = 0;
int save_errno = errno;
volatile HaShmemData* hashmdata = t_thrd.postmaster_cxt.HaShmData;
gs_signal_setmask(&t_thrd.libpq_cxt.BlockSig, NULL);
……
if ((mode = CheckSwitchoverSignal()) != 0 && WalRcvIsOnline() && DataRcvIsOnline() &&
(pmState == PM_STARTUP || pmState == PM_RECOVERY || pmState == PM_HOT_STANDBY || pmState == PM_WAIT_READONLY)) {
if (!IS_SHARED_STORAGE_STANDBY_CLUSTER_STANDBY_MODE) {
ereport(LOG, (errmsg("to do switchover")));
/* Label the standby to do switchover */
t_thrd.walreceiverfuncs_cxt.WalRcv->node_state = (ClusterNodeState)mode;
if (g_instance.attr.attr_storage.dcf_attr.enable_dcf && t_thrd.dcf_cxt.dcfCtxInfo->isDcfStarted) {
PaxosPromoteLeader();
} else {
/* Tell walreceiver process to start switchover */
signal_child(g_instance.pid_cxt.WalReceiverPID, SIGUSR1);
}
} else {
ereport(LOG, (errmsg("standby cluster could not do switchover")));
}
}
……
}
- walreceiver收到SIGUSR1信号,同样调用自己的sigusr1_handler函数,将start_switchover变量修改为true。另外walreceiver线程会循环调用WalRcvrProcessData来处理各类信息,在这个函数里会判断start_switchover的值,当为true时调用XLogWalRcvSendSwitchRequest使用TCP连接给主节点发送StandbySwitchRequestMessage消息,消息类型用字符’s’表示。
- 主节点的walsender收到消息后给主节点的postmaster发送SIGUSR1信号,同时指定PMSignalFlags[PMSIGNAL_DEMOTE_PRIMARY]为true。PMSignalFlags是一个整型数组,表示所有使用SIGUSR1信号通信的原因标识集合。收到SIGUSR1信号的线程可以通过判断具体某个标识是否为true来执行不同的处理逻辑。
c++
//pmsignal.cpp
void SendPostmasterSignal(PMSignalReason reason)
{
/* If called in a standalone backend, do nothing */
if (!IsUnderPostmaster)
return;
/* Atomically set the proper flag , sig_atomic_t PMSignalFlags[NUM_PMSIGNALS] */
t_thrd.shemem_ptr_cxt.PMSignalState->PMSignalFlags[reason] = true;
gs_signal_send(PostmasterPid, SIGUSR1);
}
bool CheckPostmasterSignal(PMSignalReason reason)
{
/* Careful here --- don't clear flag if we haven't seen it set */
if (t_thrd.shemem_ptr_cxt.PMSignalState->PMSignalFlags[reason]) {
t_thrd.shemem_ptr_cxt.PMSignalState->PMSignalFlags[reason] = false;
return true;
}
return false;
}
- 主节点postmaster处理收到的SIGUSR1信号,检查PMSignalFlags判断是降备请求则开始降备,walsender判断降备完成后给备节点的walreceiver发送PrimarySwitchResponseMessage消息,消息类型用字符’p’表示。
c++
//postmaster.cpp
if (CheckPostmasterSignal(PMSIGNAL_DEMOTE_PRIMARY)) {
gs_lock_test_and_set_64(&g_instance.stat_cxt.NodeStatResetTime, GetCurrentTimestamp());
ProcessDemoteRequest();
}
- walreceiver收到消息后与备节点的postmaster发送SIGUSR1信号,同时指定PMSignalFlags[PMSIGNAL_PROMOTE_STANDBY]为true,准备开始升主。
- 备节点postmaster处理收到的SIGUSR1信号,检查PMSignalFlags判断是升主请求,给startup线程发送SIGUSR2信号,同时指定NotifySignalFlags[NOTIFY_SWITCHOVER]为true(与PMSignalFlags类似)。
- startup线程收到SIGUSR2信号,判断NotifySignalFlags为switchover操作,将switchover_triggered变量修改为true。变量为true会触发关闭walreceiver等线程,结束日志恢复,startup线程退出(startup线程在备节点常驻,主节点完成日志恢复后即退出)。
- 备节点postmaster收到startup退出时发出的SIGCHLD信号,更新状态,切换完成。
上面介绍的switchover执行过程中主要用到了SIGUSR1/SIGUSR2/SIGCHLD信号、全局变量、TCP等线程通信方式。通过梳理switchover的执行过程,可以看到一个请求或任务的实现涉及大量线程间的协调交互,在不同的任务中线程间使用多种通信方式紧密配合,可以更高效稳定的完成数据处理任务。